4.1 Projections
Dans cette section et les suivantes, on considère certains types particuliers d’applications linéaires, projections, symétries, réflexions et rotations. Ces applications seront d’abord définies à l’aide d’une propriété algébrique, puis on les interprétera en visualisant leur effet sur les vecteurs, à l’aide d’un choix de repère.
Si est une projection, associée à la matrice en base canonique, alors est associée à la matrice , et donc satisfait .
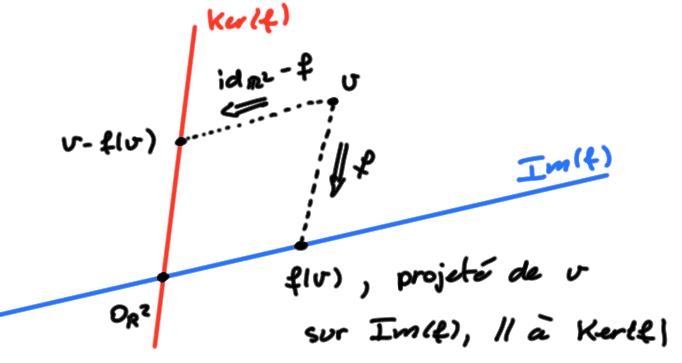
Si est une projection, cette dernière proposition permet d’écrire, pour tout ,
Choisissons un repère, et représentons cette relation géométriquement à l’aide d’un parallélogramme:

Cette image permet de faire une remarque simple concernant la géométrie de l’application : sous l’effet de , est envoyé sur son image selon une direction qui est parallèle à son noyau.
Voyons cette particularité des projections dans les cas qui nous intéressent (dimensions ou ). Considérons donc une projection , de rang , et discutons de l’interprétation géométrique de l’application , en fonction de et .
- Dans :
- Si : est identiquement nulle, , , donc rien à interpréter.
- Si , et sont des droites vectorielles. Sous l’action de , un vecteur est projeté sur la droite , parallèlement à la droite .
- Si : et . Puisque , on a donc , c’est-à-dire pour tout . Ceci implique que n’est rien d’autre que l’application identité, , et sa matrice en base canonique est .
- Dans :
- Si : est identiquement nulle, , , donc rien à interpréter.
Si , est une droite vectorielle, et est un plan vectoriel. Sous l’action de , un vecteur est projecté sur la droite , parallèlement au plan .
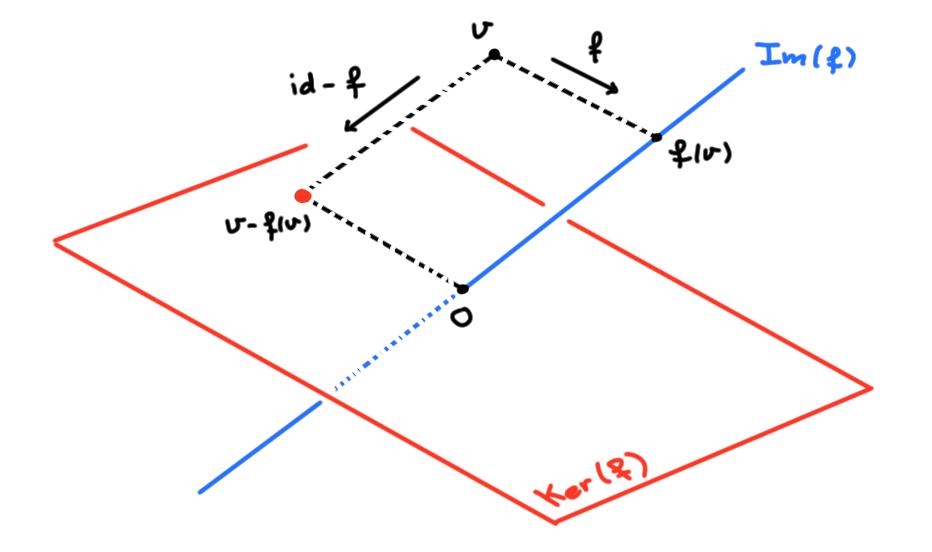
Si , est un plan vectoriel, et est une droite vectorielle. Sous l’action de , un vecteur est projecté sur le plan , parallèlement à la droite .

- Si : et . Puisque , on a donc , c’est-à-dire pour tout . Ceci implique que n’est rien d’autre que application identité, , et sa matrice en base canonique est .
Lorsqu’on étudie une projection, on cherchera donc ses éléments caractéristiques, à savoir les objets géométriques qui lui sont associés: d’abord l’ensemble sur lequel elle projette (), puis la direction parallèlement à laquelle se fait la projection ().
Avant de passer aux exemples, une remarque importante. Si est une projection, définissons comme suit:
Plus simplement: . Remarquons que pour tout ,
On conclut que , à savoir que est aussi une projection. Donc on peut lui appliquer la proposition du dessus: pour tout , et
l’interprétation géométrique étant: sous l’action de , un vecteur est projeté sur , parallèlement à . Mais , ce qui mène à la conclusion suivante:
c’est-à-dire
On utilisera ces relations souvent dans la suite, notamment pour calculer les éléments caractéristiques d’une projection.
- ,
- .
- ,
- .
Si on visualise dans un choix de repère:
On verra d’autres exemples après avoir exploré les résultats de la section suivante.
Faisons d’abord une remarque qui peut simplifier le calcul de l’ensemble image d’une projection:
Polycopié rédigé par Mathieu Huruguen, Sacha Friedli. Sauf indication contraire, le contenu de ce document est soumis à une licence Creative Commons internationale, Attribution - Utilisation non commerciale - Partage dans les mêmes conditions 4.0 International (CC BY-NC-SA 4.0).
© 2026 Projet Botafogo. En savoir plus.